Holistic Operational Reality for Unified Systems
Mixed-reality interfaces for multi-robot visualization, teleoperation, tasking, and collaborative control.
HORUS is a research platform from the RICE Laboratory at the University of Genoa. The project studies how operators supervise robot teams in mixed reality, from single-operator multi-robot management to multi-operator co-located and private-workspace collaboration.
Publications
Paper pages collect the publication record, release links, citation entries, and related project resources.
Collaborative HORUS extension comparing co-located shared workspaces with private workspaces for multi-operator robot-team control.
HORUS baseline paper introducing the mixed-reality mini-map workspace for multi-robot monitoring, tasking, and teleoperation.
Extended Abstracts and Workshops
Earlier HORUS research outputs presented through the Italian Conference on Robotics and Intelligent Machines.
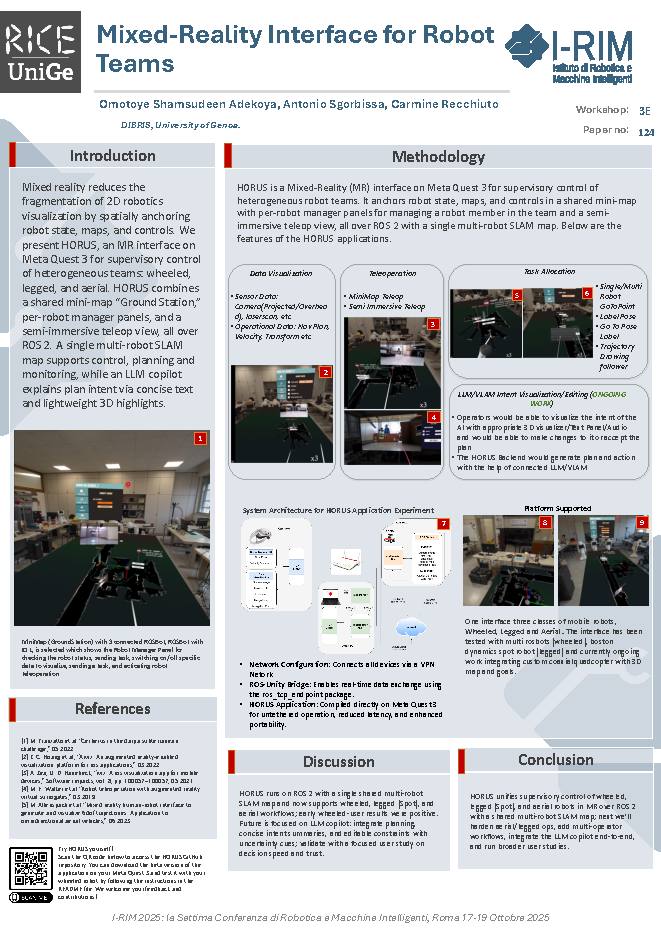
Updated HORUS extended abstract covering ROS 2 operation, multi-robot SLAM with a shared occupancy map, Spot integration, an aerial-robot pathway, and an LLM planning copilot under development.
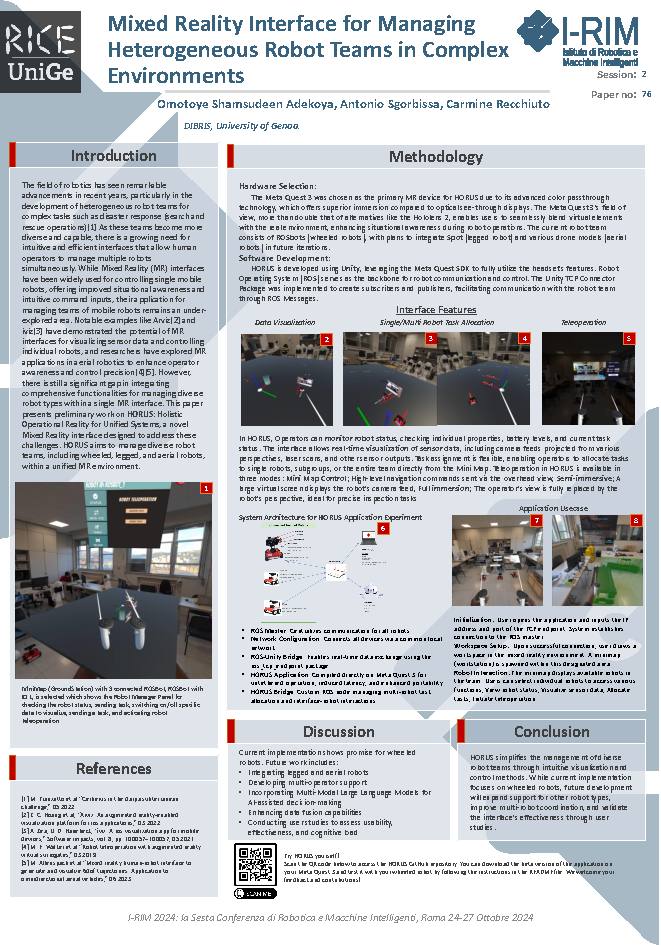
Preliminary HORUS extended abstract on mixed-reality supervision for wheeled, legged, and aerial robot teams.
Software
The public release channel links the APK packages, SDK, ROS 2 bridge runtime, and project source used around the HORUS research stack.
Citation
Copy the current BibTeX entries below.
@misc{adekoya2026multioperator,
title = {A Multi-Operator Mixed-Reality Interface for Multi-Robot Control and Coordination: Co-Located and Private Workspace Collaboration},
author = {Adekoya, Omotoye Shamsudeen and Sgorbissa, Antonio and Recchiuto, Carmine Tommaso},
year = {2026},
eprint = {2606.07013},
archivePrefix = {arXiv},
primaryClass = {cs.RO},
url = {https://arxiv.org/abs/2606.07013},
note = {arXiv preprint arXiv:2606.07013; accepted to IEEE RO-MAN 2026}
}@misc{adekoya2025horus,
title = {HORUS: A Mixed Reality Interface for Managing Teams of Mobile Robots},
author = {Adekoya, Omotoye Shamsudeen and Sgorbissa, Antonio and Recchiuto, Carmine Tommaso},
year = {2025},
eprint = {2506.02622},
archivePrefix = {arXiv},
primaryClass = {cs.RO},
url = {https://arxiv.org/abs/2506.02622},
note = {arXiv preprint arXiv:2506.02622; accepted to IEEE UR 2026}
}